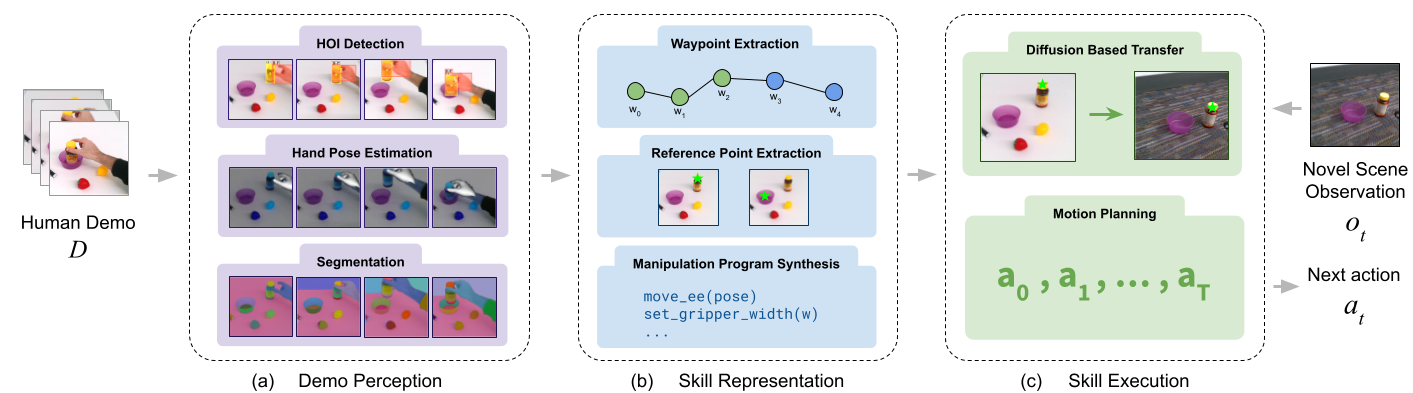
Diffusion-Pbd composes a mixture of pre-trained web-scale foundation models to both extract salient structure from demonstration videos and to transfer that structure to new scenes. The approach is composed of three main phases: (a) human and object detection, (b) waypoint extraction, (c) skill execution. In the first phase, we pre-process the demonstration frames by detecting human hands and their interactions with objects in the scene. Next, we map these detections to waypoints and robot gripper configurations. We anchor the waypoints relative to observation-centric reference points. This representation allow us to map the skill to new scenes by finding corresponding reference points in the new observations.